STM32 Quadcopter
STM32 Quadcopter

This project is the continuation of the Arduino Quadcopter project. The conclusion of the latter was that while the Arduino Uno was doing fine when the calculations were on one axis, adding 2 more axis to stabilize in addition of the support of the controller was too much for the board to process in real time.
That's where the STM32 board arrives. With a 72 MHz frequency, it beats any Arduino boards by an ample margin. In addition, with a few tweaks, it is Adruino compatible. While it isn't a deal breaker it's nice to be able to reuse the Pre-existing code.
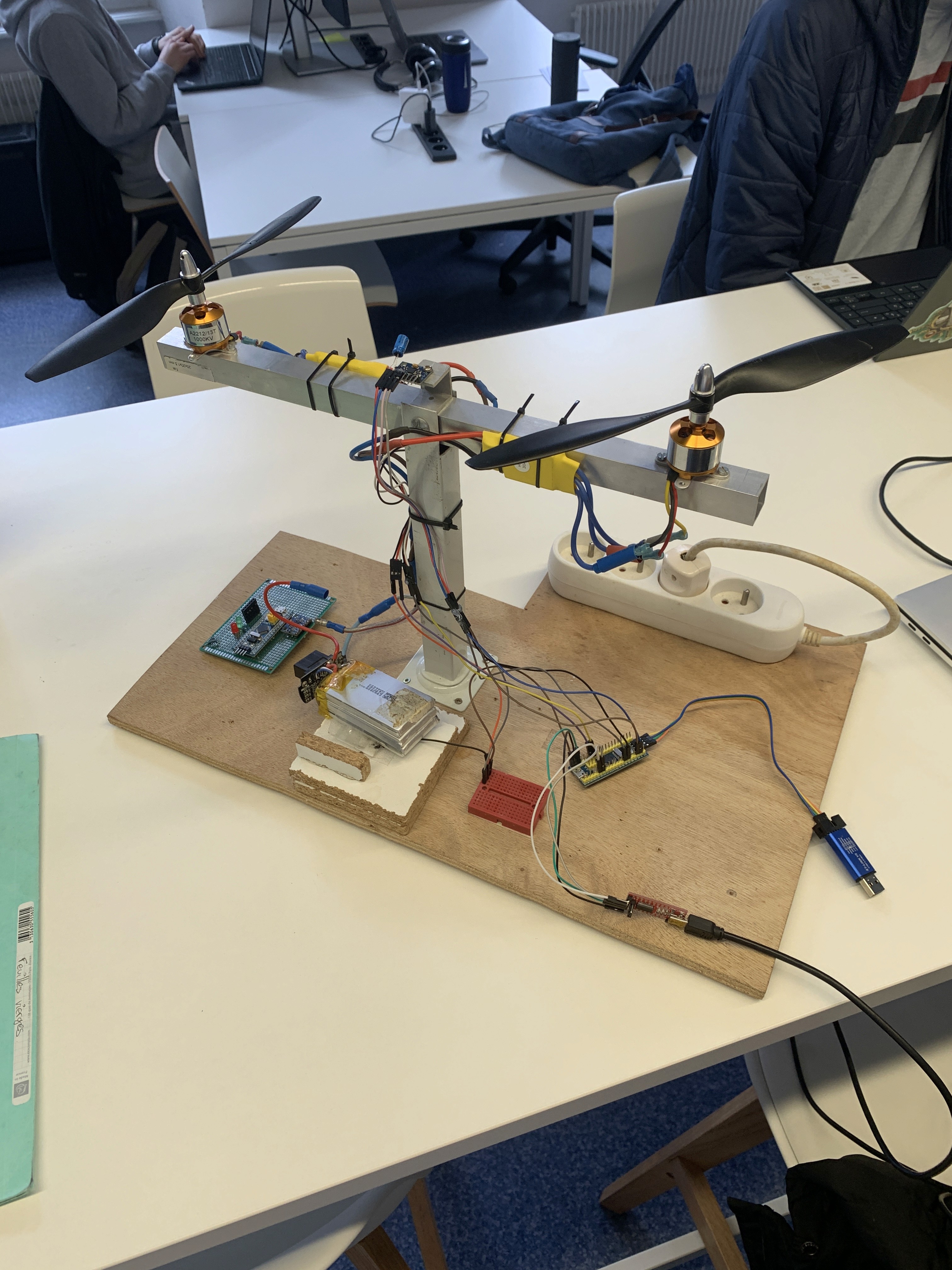
The Most Difficult and most time consuming part was to tune the 6 PIDs. A lot of trials and errors, especially when it turned out that the IMU I was using was faulty. While tuning the PIDs on a single axis turned out quite simple, on the 3 axis at the same time it turned out quite dangerous and the drone may or may not have flown straight into the ceiling…
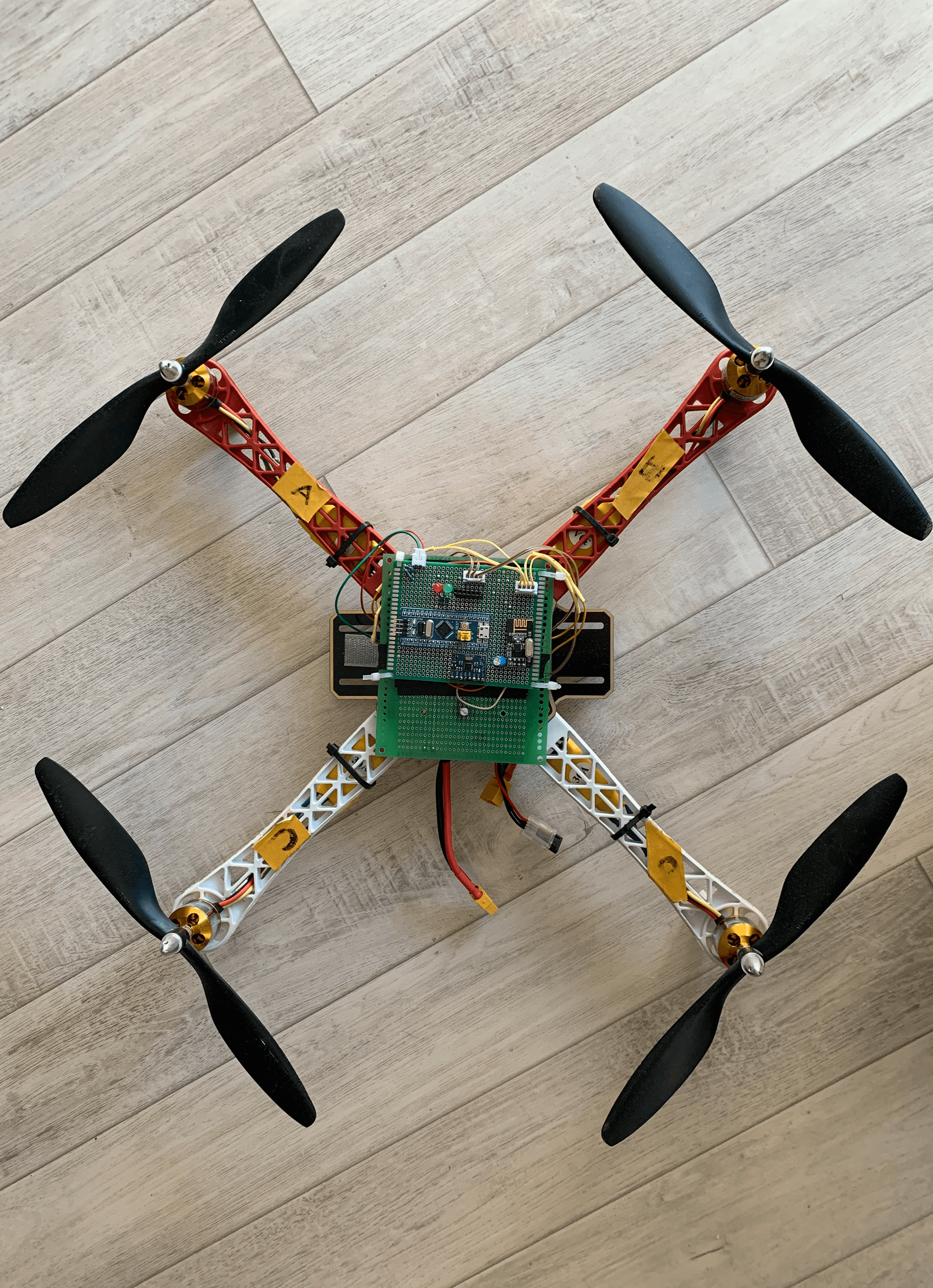
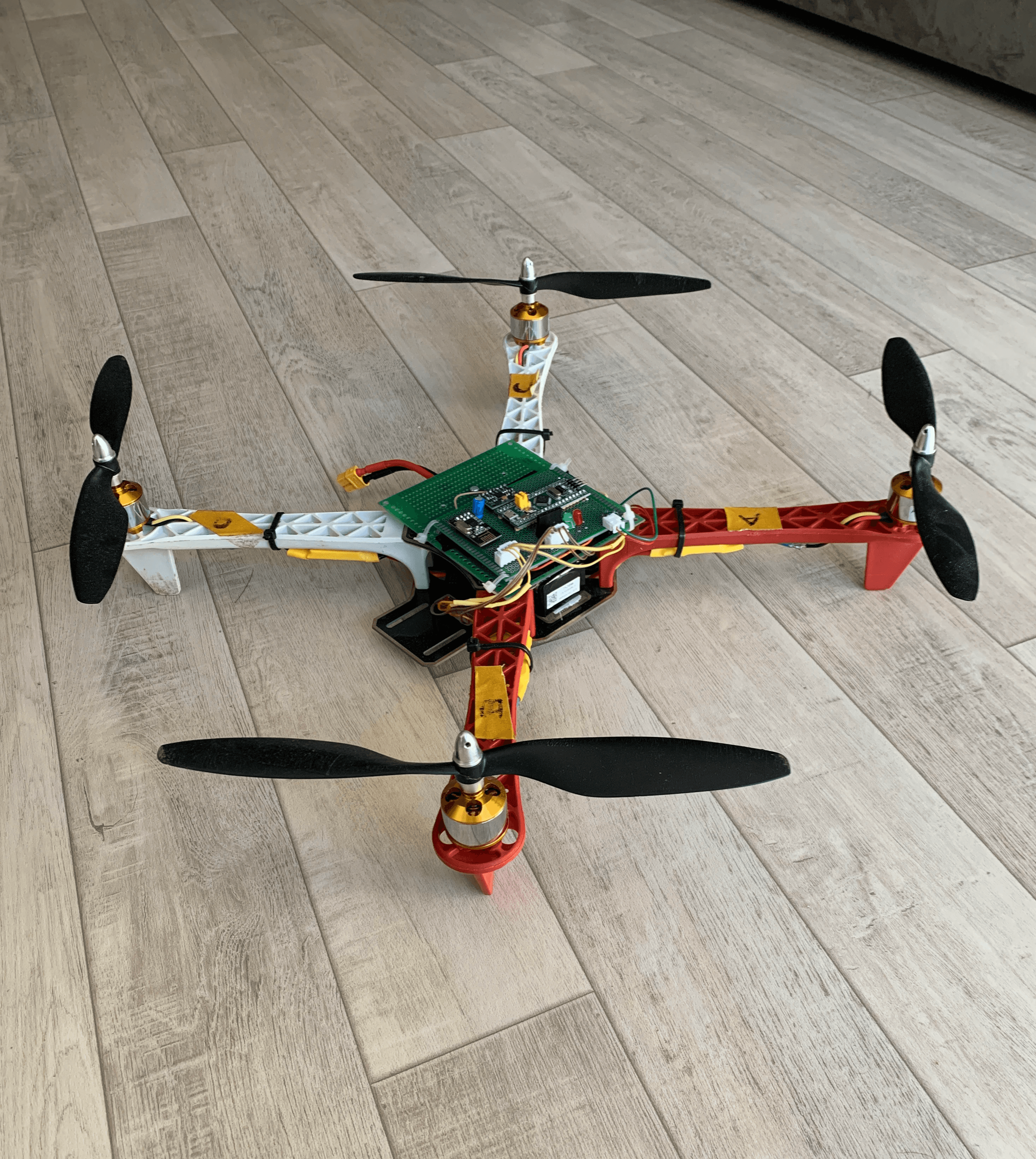
In the end, I managed to stabilize the rotation of the quadcopter on all the axis but I still need to stabilize the translation on the x and z axis.
For Explanation of the Algorithms and code used, please refer to the Arduino Quadcopter or the Github Repository